उद्योग एल्यूमीनियम और एसएस316एल के लिए वाल्व पोजिशनर निर्माता एमओआरसी एमएसपी-25



विशेषताएँ
तकनीकी मापदंड
| आइटम/मॉडल | स्मार्ट पोजिशनर एमएसपी-25 |
| |
| इनपुट संकेत | 4 से 20mA | ||
| आपूर्ति दबाव | 0.14 से 0.7MPa | ||
| आघात | 10~150मिमी(मानक);5~130मिमी(एडेप्टर) | 0° से 90 | |
| मुक़ाबला | 450Ω (एचएआरटी के बिना), 500Ω (एचएआरटी के साथ) | ||
| वायु कनेक्शन | पीटी(एनपीटी)1/4 | ||
| गेज कनेक्शन | पीटी(एनपीटी)1/8 | ||
| पाइपलाइन | जी 1/2,एनपीटी1/2,एम20*1.5 | ||
| repeatability | ±0.5% एफएस | ||
| व्यापक तापमान। | सामान्य: | -20 से 80℃ | |
| सामान्य: | -40 से 80℃ | ||
| रैखिकता | ±0.5% एफएस | ||
| हिस्टैरिसीस | ±0.5% एफएस | ||
| संवेदनशीलता | ±0.5% एफएस | ||
| हवा की खपत | स्थिर स्थिति:<0.0006Nm3/h | ||
| प्रवाह क्षमता | पूरी तरह से खुला:130L/मिनट@6.0bar) | ||
| आउटपुट विशेषताएँ | रैखिक (डिफ़ॉल्ट);शीघ्र खुला; | ||
| सामग्री | एल्यूमिनियम या SS316L | ||
| दीवार | आईपी66 | ||
| विस्फोट विरोधी | पूर्व डीबी आईआईसी टी6 जीबी;एक्स टीबी IIIC T85℃ डीबी | ||
इलेक्ट्रो-वायवीय नियंत्रण सिद्धांत:
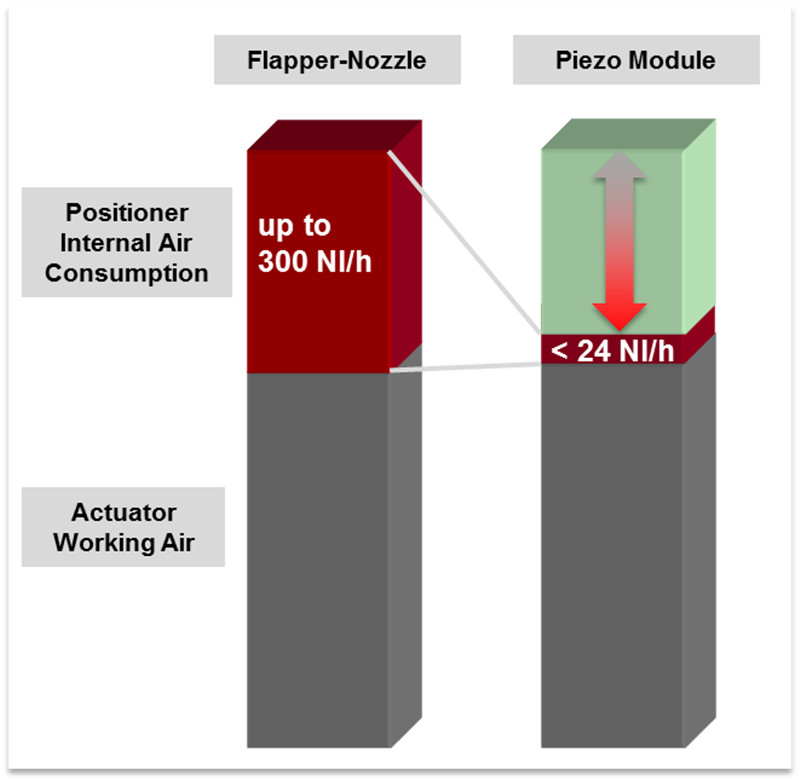
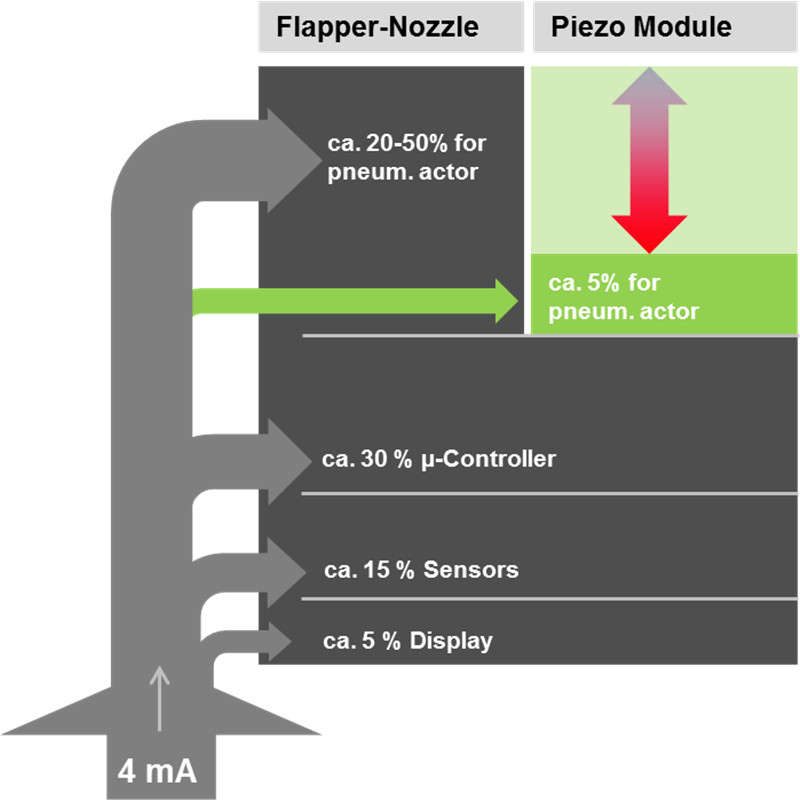
जर्मनी HOERBIGER से आयातित P13 पीजोइलेक्ट्रिक वाल्व विद्युत नियंत्रण मॉड्यूल का चयन किया गया है।पारंपरिक नोजल-बैफल सिद्धांत पोजिशनर की तुलना में, इसमें कम हवा की खपत, कम बिजली की खपत, तेज प्रतिक्रिया और लंबे जीवन के फायदे हैं।


मुख्य विशेषताएं और कार्य
उत्पाद की विशेषताएँ
उन्नत आईपी मौडल को अपनाते हुए, इसमें एक अद्वितीय वायु पथ संरचना है, जो पीजोइलेक्ट्रिक वाल्व पर वायु स्रोत की गुणवत्ता के प्रभाव को प्रभावी ढंग से कम कर सकती है।
~ स्थापित करने और कैलिब्रेट करने में आसान।
~ वाल्व की स्थिति स्थिर होने पर लगभग शून्य वायु स्रोत खपत।
•एक ही प्रकार का पोजिशनर रैखिक या रोटरी एक्चुएटर्स पर लागू किया जा सकता है।
•मॉड्यूलर डिज़ाइन, कम चलने वाले हिस्से, रखरखाव में आसान।
एलसीडी बैकलाइट डिस्प्ले और बटन ऑपरेशन के साथ, सरल ऑपरेशन विभिन्न प्रकार के कार्य प्राप्त कर सकता है।
•वाल्व और एक्चुएटर का स्वचालित निदान प्राप्त कर सकते हैं।
•एक कुंजी के माध्यम से स्वचालित शून्य समायोजन फ़ंक्शन प्राप्त कर सकते हैं।
•पावर कट, एयर कट और सिग्नल कट के तहत स्थिति संरक्षण कार्य का एहसास कर सकते हैं।
एमएसपी-25 स्थापना
माउंटिंग ब्रैकेट के साथ एमएसपी-25एल स्थापित करें
1. पोजिशनर के लिए एक माउंटिंग ब्रैकेट बनाएं जिसे एक्चुएटर ब्रैकेट से ठीक से जोड़ा जा सके।
ध्यान दें: यह आवश्यक है कि ब्रैकेट बनाते समय वाल्व के स्ट्रोक के भीतर लीवर का घूर्णन कोण अनुमेय कोण सीमा के भीतर समायोज्य हो।
2. माउंटिंग ब्रैकेट और एमएसपी-25एल को जोड़ने के लिए निश्चित बोल्ट का उपयोग करना, इंस्टॉलेशन आरेख नीचे दिखाया गया है।पोजिशनर को ठीक करने के लिए मानक बोल्ट विनिर्देश है
एम8* 1.25पी.
3. ब्रैकेट और पोजिशनर को ठीक करने के बाद, एक्चुएटर से कनेक्ट करने से पहले बोल्ट को पूरी तरह से कसें नहीं, और बाद में समायोजन के लिए एक निश्चित अंतर छोड़ दें।
4. वाल्व स्टेम और एक्चुएटर पुश रॉड को कनेक्ट करते समय कनेक्टिंग रॉड को एमएसपी-25एल के फीडबैक लीवर पर स्थापित करें।एमएसपी-25एल के फीडबैक लीवर पर खांचे की ऊंचाई 6.5 मिमी है, इसलिए कनेक्टिंग रॉड का व्यास आकार 6.3 मिमी से कम होना चाहिए।
5. स्टेम कनेक्टर पर लगे कनेक्टिंग रॉड को फीडबैक लीवर के खांचे में डालें। जैसा कि ऊपर दिखाया गया है, अंतराल को कम करने के लिए कनेक्टर रॉड को फीडबैक लीवर पर निश्चित स्प्रिंग में डाला जाना चाहिए।
6. एक्चुएटर अलग से वायु स्रोत ट्यूब से जुड़ा होता है, और वाल्व को 50% स्थिति में खोलने के लिए दबाव को एयर फिल्टर नियामक के माध्यम से समायोजित किया जाता है, और फीडबैक लीवर को अंदर करने के लिए पोजिशनर की स्थिति को ऊपर और नीचे समायोजित किया जाता है। क्षैतिज स्थिति (फीडबैक लीवर वाल्व स्टेम के लंबवत है), और फिर फिक्सेशन बोल्ट को कस लें।
हमें क्यों चुनें?
अत्याधुनिक पीजोइलेक्ट्रिक वाल्व सिद्धांत का उपयोग करते हुए, स्मार्ट पोजिशनर के कई फायदे हैं और यह वायवीय प्रणालियों में वाल्व खोलने को नियंत्रित करने के लिए पहली पसंद है।
पीज़ोइलेक्ट्रिक वाल्व सिद्धांत का एक मुख्य लाभ कम बिजली की खपत, यानी कम हवा की खपत है।इससे लोकेटर की परिचालन लागत कम हो जाती है।स्थिर स्थिति में, इनलेट और आउटलेट पोर्ट बंद होते हैं, इसलिए नोजल सिद्धांत की तुलना में वायु स्रोत की खपत न्यूनतम होती है।
एक अन्य विशेषता जो पीजोइलेक्ट्रिक वाल्व सिद्धांत को अलग करती है वह इसका उच्च कंपन प्रतिरोध है।पोजिशनर की समग्र मॉड्यूल संरचना में कुछ चलने वाले हिस्से हैं, कोई यांत्रिक बल संतुलन तंत्र नहीं है, और अच्छा भूकंपरोधी प्रदर्शन है।यह सुविधा उन अनुप्रयोगों में विशेष रूप से महत्वपूर्ण है जहां कंपन सिस्टम में गड़बड़ी पैदा कर सकता है।
तेज़ प्रतिक्रिया समय और लंबी सेवा जीवन पीज़ोइलेक्ट्रिक वाल्व सिद्धांत के अन्य लाभ हैं।2 मिलीसेकंड जितना कम प्रतिक्रिया समय स्थितिकर्ता को सिस्टम मापदंडों में परिवर्तन के प्रति अत्यधिक प्रतिक्रियाशील बनाता है।इसके अलावा, पीजोइलेक्ट्रिक मॉड्यूल का परिचालन जीवन कम से कम 500 मिलियन गुना है, जो विश्वसनीय और लंबे समय तक चलने वाला प्रदर्शन सुनिश्चित करता है।
अपनी उन्नत सुविधाओं और फायदों के साथ, बुद्धिमान पोजिशनर वायवीय प्रणाली में वाल्व के उद्घाटन को नियंत्रित करने के लिए मुख्य उपकरण है।यह वाल्व के किसी भी उद्घाटन को सटीक रूप से समायोजित कर सकता है, और हवा या गैस के प्रवाह को समायोजित करने के लिए एक आवश्यक उपकरण है।यह स्मार्ट पोजिशनर बेजोड़ प्रदर्शन, विश्वसनीयता और मितव्ययिता प्रदान करता है, जो इसे विभिन्न प्रकार के औद्योगिक अनुप्रयोगों के लिए पहली पसंद बनाता है।
निष्कर्ष में, उत्पाद सुविधाओं और विवरण के साथ संयुक्त, पीज़ोइलेक्ट्रिक वाल्व सिद्धांत का उपयोग करने वाला स्मार्ट पोजिशनर आपके वाल्व नियंत्रण आवश्यकताओं को पूरा करने के लिए सबसे अच्छा विकल्प है।कम परिचालन लागत, मजबूत कंपन प्रतिरोध, तेज़ प्रतिक्रिया समय और लंबी सेवा जीवन सभी प्रमुख विशेषताएं हैं जो इस उत्पाद को अलग करती हैं।यदि आप बेजोड़ प्रदर्शन वाले स्मार्ट लोकेटर की तलाश में हैं, तो आपको वह मिल गया है।आज ही पीजोइलेक्ट्रिक वाल्व सिद्धांत पर आधारित हमारे स्मार्ट पोजिशनर्स चुनें और सहज वाल्व नियंत्रण का अनुभव करें।






